


- 모델 번호: 10 DOF IMU Sensor (C)
- 데모 보드 유형: 팔
- 브랜드 이름: Waveshare
- 근원: CN (정품)
- Demo Board Type: Others
개요
10 DOF IMU 센서 (C) 는 모션 모니터뿐만 아니라 위치, 높이 및 온도를 감지/측정하는 데 적합합니다. 자신의 헬리콥터 또는 균형 로봇을 만드는 데 도움이되며 훌륭한 인간-기계 상호 작용을 제공합니다.
기능
-
MPU9250: 3 축 자이로스코프, 3 축 가속도계 및 3 축 나침반/자력계
내부 디지털 모션 처리™(DMP™) 엔진, 오프로드는 융합 계산, 센서 동기화, 제스처 인식 등을 복잡하게 만듭니다.
MPU6050 과 비교하여 전력 소비가 적고 웨어러블 장치에 더 적합합니다.
-
BMP280: 기압 센서
온도 보상을위한 내장 온도 센서
I2C 인터페이스를 통해 10 DOF 데이터를 얻을 수 있습니다
사양
전력: 3.3V ~ 5.5V (낮은 드롭 아웃을 가진 내부 전압 조절)
-
가속도계
해상도: 16 비트
측정 범위 (구성 가능): ± 2, ± 4, ± 8, ± 16g
작동 전류: 450uA
-
자이로스코프
해상도: 16 비트
측정 범위 (구성 가능): ± 250, ± 500, ± 1000, ± 2000 °/초
작동 전류: 3.2mA
-
나침반/자력계
해상도: 14bit
측정 범위: ± 4800 & 마이크로; T
작동 전류: 280uA
-
기압 센서
기압 해상도: 0.0016hPa
온도 해상도: 0.01 °C
측정 범위: 300 ~ 1100hPa (고도: + 9000m ~ -500m)
기압 상대 정확도 (700hPa ~ 900hPa, 25 °C ~ 40 °C): ± 0.12hPa (± 1m)
작동 전류 (1Hz 업데이트 속도, 초저전력 모드): 2.8uA
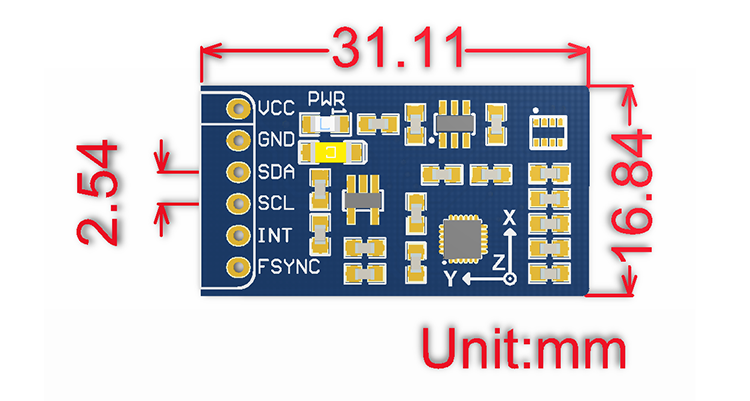
인터페이스
PIN NO. |
기호 |
설명 |
1 |
VCC |
3.3V ~ 5.5V 전원 공급 장치 |
2 |
GND |
전원 접지 |
3 |
SDA |
I2C 데이터 핀 |
4 |
SCL |
I2C 시계 핀 |
5 |
INT |
MPU9250 디지털 인터럽트 출력 |
6 |
FSYNC |
MPU9250 프레임 동기화 신호 |
차원
개발 자원
위키:
패키지 내용물
무게: 0.003 kg
10 DOF IMU 센서 (C) × 1