

상품정보
- 브랜드 이름: miusecn
- 데모 보드 유형: 팔
- 원산지: 중국
- 증명서: NONE
소개
DAPLink-HS는 Muse Lab에서 시작한 고속 디버그 프로브입니다. 외관이 절묘하고 컴팩트합니다. CMSIS-DAP/DAPLink 디버그 프로브와 비교할 때 DAPLink-HS의 레코딩 속도는 DAPLink-HS가 USB 2.0 High Speed를 사용하여 데이터를 전송하므로 훨씬 빠릅니다. DAPLink-HS는 세 가지 인터페이스를 제공합니다. 드래그 앤 드롭 프로그래밍, 직렬 포트 및 디버깅 지원입니다. 또한 부트 로더의 드래그 앤 드롭 프로그래밍 인터페이스를 사용하여 DAPLink-HS 펌웨어를 업데이트 할 수 있습니다.

사양

기능
● 사용 USB 2.0 고속 데이터를 전송

● STM32, GD32, NRF51/52 와 같은 ARM Cortex 코어를 기반으로 한 대상 MCU 프로그래밍 및 디버깅 지원

● 지원 SWD 및 JTAG 디버깅 커넥터
드라이버 없는 CMSIS-DAP 기반 디버깅 인터페이스는 CMSIS-DAP 디버그 프로토콜이 실행되는 채널을 제공합니다. 이를 통해 모든 업계 표준 도구 체인이 대상 시스템을 프로그래밍하고 디버깅할 수 있습니다. 지원되는 도구:
?케일 MDK
?IAR 워크벤치
?PyOCD
?다른 CMSIS-DAP 가능한 디버거
● USB 직렬 포트 지원
DAPLink-HS 디버그 프로브는 대상 시스템의 TTL UART에 연결할 수있는 USB 직렬 포트도 제공합니다. USB 직렬 포트는 Windows 컴퓨터에서 COM 포트로 표시되거나 Linux 컴퓨터에서/dev/ty 인터페이스로 표시되고 Mac OS에서는/dev/usbmodem으로 표시됩니다.
● USB 드래그 앤 드롭 프로그래밍 지원
DAPLink-HS 디버그 프로브는 호스트 컴퓨터에도 USB 디스크로 나타납니다. 이진 (.bin) 및 16 진수 (.hex) 형식의 프로그램 파일을 USB 디스크에 복사 한 다음 대상 시스템의 메모리로 프로그래밍 할 수 있습니다. 이것은 인터페이스 펌웨어에 플래시 프로그래밍 알고리즘을 내장하여 수행됩니다. 따라서 drag0n-drop 프로그래밍을 위해서는 사용되는 DAPLink-HS 펌웨어 버전이 대상 시스템을 위해 특별히 제작되는 것이 중요합니다.
● 부트 로더의 드래그 앤 드롭 프로그래밍 인터페이스로 펌웨어 업그레이드 지원
● 지원 소프트웨어 재설정, 펌웨어 다운로드를 완료하면 대상 보드가 재설정됩니다
드라이버 설치
Linux 및 Mac OS에는 드라이버가 필요하지 않지만 Windows 10 보다 오래된 Windows 버전에는 직렬 포트 드라이버가 필요합니다. https://github.com/wuxx/nanoDAP-HS/tree/master/driver/windows7_serial_driver "mbedWinSerial_16466.exe" 드라이버를 다운로드하십시오.

프로그램 하는 방법
1. SWD 또는 JTAG 커넥터로 DAPLink-HS 디버그 프로브를 대상 보드와 연결하십시오


2. DAPLink-HS 디버그 프로브를 호스트 컴퓨터에 연결하십시오. 직렬 포트와 USB-HID 장치가 컴퓨터의 장치 관리자에 나타납니다. "DAPLINK" 라는 이름의 USB 디스크도 호스트 컴퓨터에 나타납니다.


3. 디버깅 도구를 구성합니다. Keil MDK를 예로 들어보십시오 (SWD 연결).
(1) Keil을 열고 "Target 옵션"-> "디버그" 를 클릭 한 다음 "CMSIS-DAP 디버거" 를 선택하십시오.

(2) "설정" 버튼을 클릭하고 아래와 같이 "디버그" 페이지를 구성합니다.

(3) 아래와 같이 "Flash 다운로드" 페이지 구성

4. “다운로드” 버튼을 클릭하거나 F8 을 입력하여 코드를 대상 보드에 다운로드하십시오.
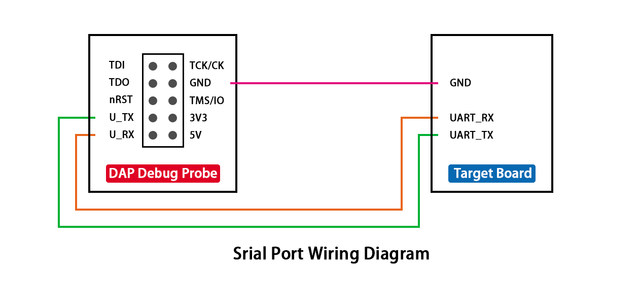
직렬 포트를 사용하는 방법
1. 아래 그림과 같이 DAPLink-HS 디버그 프로브를 대상 보드와 연결하십시오.
2. DAPLink-HS 디버그 프로브를 호스트 컴퓨터에 연결하십시오. 장치 관리자에서 일련 포트 번호 확인

3. 퍼티, SSCOM과 같은 호스트 컴퓨터에서 직렬 포트 도구를 엽니 다. 대상 보드에 연결할 시리얼 포트 번호 및 전송 속도를 구성합니다.


드래그 앤 드롭하는 방법
1. SWD 또는 JTAG 커넥터로 DAPLink-HS 디버그 프로브를 대상 보드와 연결하십시오
2. DAPLink-HS를 호스트 컴퓨터에 연결하십시오. "DAPLINK" 라는 USB 디스크가 PC에 나타납니다. 이진 (.bin) 및 16 진수 (.hex) 형식의 프로그램 파일을 드래그하여 USB 디스크에 놓습니다. 그런 다음 펌웨어가 대상 시스템의 메모리에 프로그래밍됩니다.

드래그 앤 드롭 프로그래밍이 작동하려면 사용되는 DAPLink-HS 펌웨어 버전이 대상 시스템 용으로 특별히 구축되어야합니다.
펌웨어를 업데이트하는 방법
1. 듀퐁 회선으로 nRST와 DAPLink-HS의 GND를 연결하십시오. 그런 다음 DAPLink-HS를 호스트 컴퓨터에 연결하십시오. "MAINTENANCE" 라는 USB 디스크가 PC에 나타납니다.
2. GND 핀으로 nRST를 분리하십시오. 새 펌웨어를 드래그하여 USB 디스크에 놓습니다. 그런 다음 새 펌웨어가 DAPLink-HS 디버그 프로브의 메모리에 프로그래밍됩니다.

OpenOCD로 프로그래밍하는 방법
대상 MCU를 OpenOCD로 프로그래밍하는 스크립트 도구를 제공합니다. https://github.com/wuxx/openocd-toolbox. 스크립트 도구를 다운로드하십시오. 그런 다음 설치하지 않고 스크립트를 두 번 클릭하십시오.
문서
● 사용자 설명서: https://github.com/wuxx/nanoDAP-HS/blob/master/README.md
● Win7 용 직렬 포트 드라이버: https://github.com/wuxx/nanoDAP-HS/tree/master/driver/windows7_serial_driver
● OpenOCD 용 스크립트 도구: https://github.com/wuxx/openocd-toolbox
FAQ
● Q: 컴퓨터에 Windows 7 에 직렬 포트 드라이버가 없다는 메시지가 표시됩니다.
A: Linux 및 Mac OS에는 드라이버가 필요하지 않지만 Windows 10 이전 버전에는 직렬 포트 드라이버가 필요합니다. https://github.com/wuxx/nanoDAP-HS/tree/master/driver/windows7_serial_driver 드라이버를 다운로드하십시오.
● Q: Keil MDK는 "SWD/JTAG 통신 실패" 를 묻습니다. 어떻게 해결합니까?
A: 먼저 디버그 프로브와 대상 보드의 핀이 올바르게 연결되어 있는지 확인하십시오. 두 번째 대상 보드의 전압 충분한지 확인 부탁드립니다. 디버그 프로브로 대상 보드에 전원을 공급하는 경우 USB의 최대 출력 전류가 500mA 이므로 전압이 부족할 수 있습니다.
● Q: Keil MDK는 "RDDI-DAP 오류" 를 묻습니다. 어떻게 해결합니까?
A: 먼저 디버그 프로브와 대상 보드의 핀이 올바르게 연결되어 있는지 확인하십시오. 둘째, 듀폰 회선이 너무 길면 듀폰 회선 간의 신호가 서로 간섭할 수 있으므로 더 짧은 듀폰 회선을 사용하십시오. 프로그래밍 속도를 줄이려고 할 수도 있습니다. 일반적으로 위의 방법으로 문제를 해결할 수 있습니다.
● Q: DAPLink-HS는 드래그 앤 드롭 프로그래밍을 지원하는 칩은 무엇입니까?
A: DAPLink-HS는 여러 칩의 드래그 앤 드롭 프로그래밍을 지원합니다. https://github.com/ARMmbed/DAPLink/tree/master/source/family. 참조하시기 바랍니다
앞으로 ARM 커뮤니티의 개발로 더 많은 칩이 지원 될 것입니다. 자신의 칩을 드래그 앤 드롭 프로그래밍을 지원해야하는 경우 소스 코드를 참조하여 일부 코드를 변경할 수 있습니다.
● Q: DAPLink-HS 디버그 프로브를 Linux에서 디버깅에 사용할 수 있습니까?
A: Linux에서는 OpenOCD와 함께 DAPLink-HS를 사용하여 대상 MCU를 프로그래밍하고 디버깅 할 수 있습니다. OpenOCD는 오픈 소스이며 강력한 기능을 갖춘 전 세계적으로 인기 있는 디버깅 도구입니다. OpenOCD는 크로스 플랫폼이므로
OpenOCD를 사용하여 구성 스크립트를 작성하여 Windows에서 MCU를 디버깅하십시오.